Optimizing Intersecting Geometry#
In this tutorial, we demonstrate how our method optimizes geometry effectively, even when intersections are present. Note that there is no difference from the previous tutorial, except for the scene setup. Intersections are correctly handled without any additional effort.
Imports#
[1]:
import drtk
import numpy as np
import torch as th
import torch.nn.functional as thf
from IPython.display import display
from PIL import Image
from torchvision.utils import save_image
I1001 205506.067 _utils_internal.py:314] NCCL_DEBUG env var is set to None
I1001 205506.069 _utils_internal.py:323] NCCL_DEBUG is INFO from /etc/nccl.conf
Triangle Scene#
In this example, we will set up a scene with multiple triangles. The scene includes three separate shapes: two individual triangles and one rectangle composed of two triangles sharing an edge. To distinguish these shapes, we will assign distinct colors to each of them.
[2]:
# Target vertex position
v_target = np.asarray(
[
[48.76, 151.9, 100],
[443.9, 36.69, 100],
[287.9, 480.1, 100],
[285.0, 118.0, 50],
[453.0, 118.0, 50],
[285.0, 271.0, 50],
[453.0, 271.0, 50],
[53.53, 388.2, 91],
[215.7, 212.4, 91],
[383.0, 480.9, 120],
],
dtype=np.float32,
)
# Initial vertex positions
v = np.asarray(
[
[12.08, 31.02, 100],
[455.8, 71.94, 100],
[168.9, 540.1, 100],
[260.0, 110.0, 80],
[478.0, 110.0, 80],
[260.0, 235.0, 80],
[478, 235.0, 80],
[75.85, 386.0, 95],
[215.1, 226.1, 95],
[378.8, 481.1, 280],
],
dtype=np.float32,
)
vi = np.asarray(
[
[0, 1, 2],
[3, 4, 5],
[6, 4, 5],
[7, 8, 9],
],
dtype=np.int32,
)
ci = np.asarray(
[
[0.8, 0.8, 0.8],
[0.8, 0.2, 0.1],
[0.8, 0.2, 0.1],
[0.2, 0.2, 0.8],
],
dtype=np.float32,
)
width = 512
height = 512
vt = np.zeros((v.shape[0], 2), dtype=np.float32)
vti = vi.copy()
vt = th.as_tensor(vt, dtype=th.float32)[None].cuda()
vi = th.as_tensor(vi, dtype=th.int32).cuda()
vti = th.as_tensor(vti, dtype=th.int32).cuda()
ci = th.as_tensor(ci, dtype=th.float32).cuda()
v_target = th.as_tensor(v_target)[None,].cuda()
v = th.as_tensor(v)[None,].cuda()
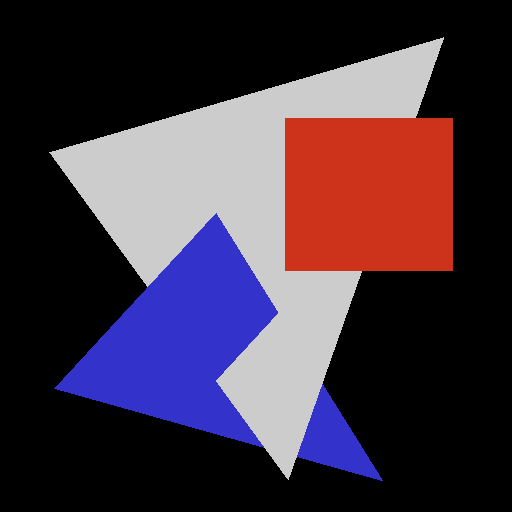
Next, we render the target image
[3]:
# Render target image
index_img = drtk.rasterize(v_target, vi, height, width)
_, bary_img = drtk.render(v_target, vi, index_img)
image_target = (index_img != -1)[:, None] * ci[index_img].permute(0, 3, 1, 2)
save_image(image_target, "img.png")
display(Image.open("img.png"))
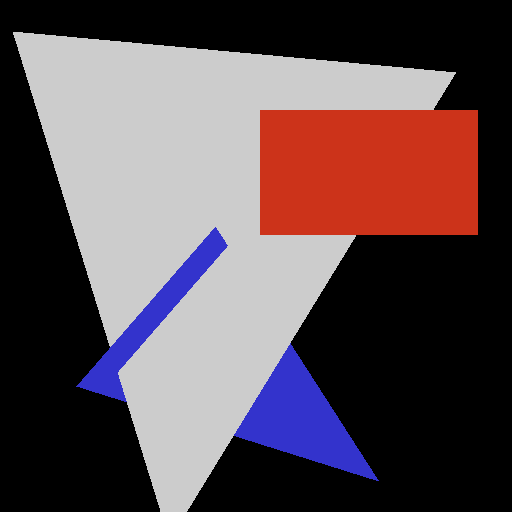
Netx, we render the scene in the at initialization
[4]:
# Render initial scene
index_img = drtk.rasterize(v, vi, height, width)
_, bary_img = drtk.render(v, vi, index_img)
image = (index_img != -1)[:, None] * ci[index_img].permute(0, 3, 1, 2)
save_image(image, "img.png")
display(Image.open("img.png"))
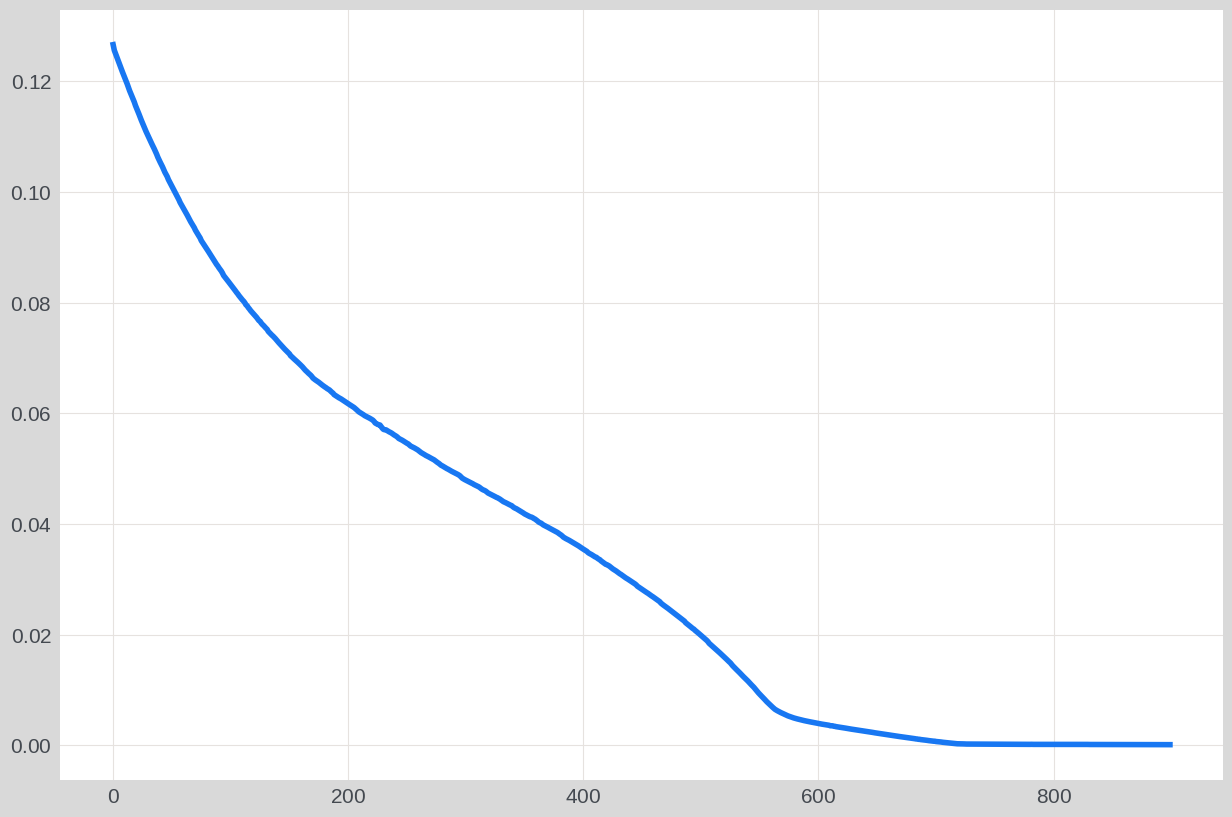
Next, we will optimize vertex position in order to match the target image. We will also visualize the gradients.
[5]:
import av
import imageio
import IPython.display
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image, ImageDraw, ImageFont
from tqdm import tqdm
container = av.open(
"out.mp4",
mode="w",
format="mp4",
options={"movflags": "frag_keyframe+empty_moov"},
)
video_stream = container.add_stream(
"libx264",
width=1024,
height=1024 + 512,
pix_fmt="yuv420p",
framerate=24,
)
font = ImageFont.truetype("/usr/share/fonts/truetype/ttf-dejavu/DejaVuSans.ttf", 24)
loss_list = []
v_param = th.nn.Parameter(v.clone())
opt = th.optim.SGD([v_param], lr=800.0)
tensor = []
# A simple hook to save the gradient
def save_tensor(x: th.Tensor):
tensor.append(x)
def conv_img(x: th.Tensor) -> th.Tensor:
with th.no_grad():
x = (x * 255).type(th.long).clamp(0, 255).cpu()
if len(x.shape) == 4:
x = x[0, :, :, :]
return x.type(th.uint8).transpose(0, 2).transpose(0, 1)
def conv_img_viridis(x: th.Tensor) -> Image:
import numpy as np
import seaborn as sns
with th.no_grad():
assert x.ndim == 2
colored = (
sns.blend_palette(["#8c179a", "#64c5c2", "#fef46a"], 6, as_cmap=True)(
x.cpu().numpy().squeeze()
)[..., :-1]
* 255.0
).astype(np.uint8)
return Image.fromarray(colored)
for iter in tqdm(range(900)):
tensor.clear()
index_img = drtk.rasterize(v_param, vi, width=512, height=512)
depth_img, bary_img = drtk.render(v_param, vi, index_img)
image = (index_img != -1)[:, None] * ci[index_img].permute(0, 3, 1, 2)
# Make `image` differentiable
image_differentiable = drtk.edge_grad_estimator(
v_param, vi, bary_img, image, index_img, v_pix_img_hook=save_tensor
)
# Compute loss and backpropagate
l2_error = thf.mse_loss(image_differentiable, image_target, reduction="none")
l2_loss = l2_error.mean()
l2_loss.backward()
loss_list.append(l2_loss.item())
opt.step()
opt.zero_grad()
if iter % 8 == 0:
im = conv_img(image)
im[:129, :129] = 255
im[:128, :128] = conv_img(thf.avg_pool2d(image_target, 4))
error = conv_img(thf.interpolate(l2_error, scale_factor=1.0))
grad = tensor[0]
grad = grad * 400000.0
gimx = th.as_tensor(np.asarray(conv_img_viridis(grad[0, 0] * 0.5 + 0.5)))
gimy = th.as_tensor(np.asarray(conv_img_viridis(grad[0, 1] * 0.5 + 0.5)))
gimz = th.as_tensor(np.asarray(conv_img_viridis(grad[0, 2] * 0.5 + 0.5)))
im[-1:] = 255
error[-1:] = 255
im1 = th.cat([im, error, th.zeros_like(im)], dim=0)
im2 = th.cat(
[gimx.expand(-1, -1, 3), gimy.expand(-1, -1, 3), gimz.expand(-1, -1, 3)],
dim=0,
)
im = th.cat([im1.expand(-1, -1, 3), im2], dim=1)
im = Image.fromarray(im.cpu().numpy())
draw = ImageDraw.Draw(im)
draw.text((0, 128 - 20), " Target", (255, 255, 255), font=font)
draw.text((0, 512 - 25), " Render", (255, 255, 255), font=font)
draw.text((0, 512 + 512 - 25), " Error", (255, 255, 255), font=font)
draw.text((512, 512 - 25), " grad_x", (255, 255, 255), font=font)
draw.text((512, 512 + 512 - 25), " grad_y", (255, 255, 255), font=font)
draw.text((512, 512 + 512 + 512 - 25), " grad_z", (255, 255, 255), font=font)
im = np.asarray(im)
container.mux(
video_stream.encode(av.VideoFrame.from_ndarray(im, format="rgb24"))
)
for packet in video_stream.encode():
container.mux(packet)
container.close()
plt.plot(loss_list)
plt.show()
IPython.display.Video("out.mp4", embed=True, width=512 * 1.5, height=512 * 2)
100%|██████████| 900/900 [00:32<00:00, 27.88it/s]
[5]:
This concludes the “Optimizing Intersecting Geometry” tutorial.